专注起重研发生产,集销售、服务、维修为一体的公司
以客户价值为中心,以质量赢市场,以创新促发展,管理以人为本,服务以质为先。
以客户价值为中心,以质量赢市场,以创新促发展,管理以人为本,服务以质为先。

您的位置:新闻中心 >
新闻资讯 / 2025-07-30
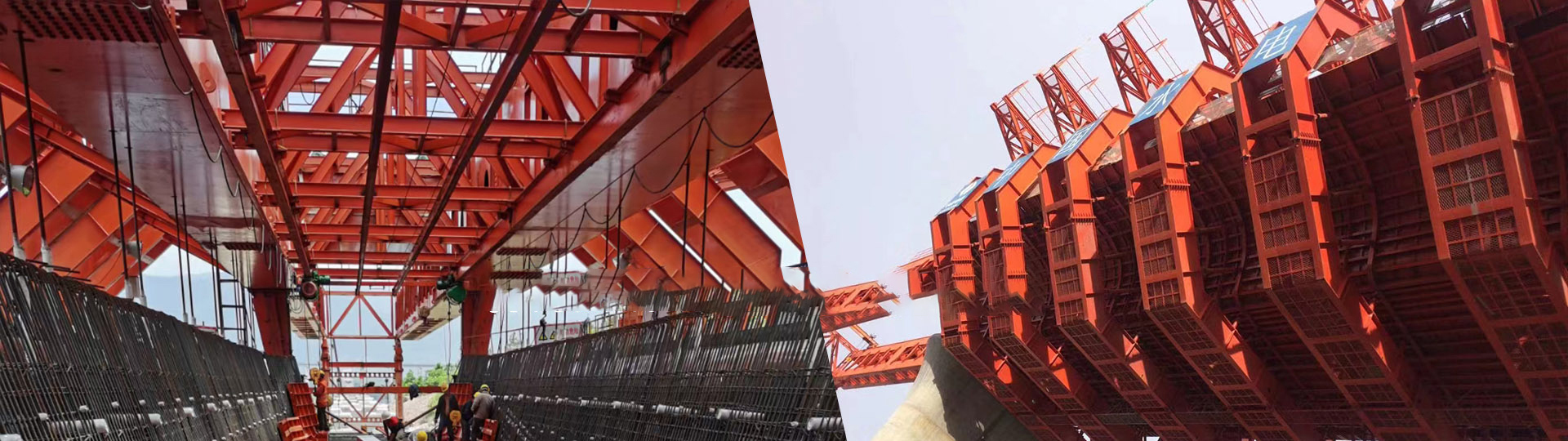
行走机构是整跨梁架桥机实现移位与定位的核心模块,直接决定架梁效率与安全性。其设计需兼顾高承载能力与地形适应性,通过机械结构与液压系统的协同实现***移动。

一、系统组成与结构形式
行走机构主要由支腿、台车、驱动系统及轨道系统构成。以 JQ900A 型架桥机为例,其采用液压驱动轮胎走行与步履纵移复合模式。支腿分为前、中、后三组:一号柱通过托挂轮组与机臂铰接,纵移时沿下耳梁滑动,架梁时转换为刚性支撑;二号柱与机臂固结形成龙门架,承受竖向荷载;三号柱配置 8 轴 16 对轮轴,32 个轮胎中 12 个为驱动轮,采用液压悬挂均衡装置,可自动补偿不同路况下的轮轴荷载。台车设计融合模块化理念,如 SPJ900/32 架桥机的中车横梁采用鱼腹式悬臂梁,通过顶升机构调整支承状态,适应不同坡度要求。
二、关键技术与驱动机制
驱动系统设计
采用液压驱动与机械传动结合的方案。例如,JQ900A 型的三号柱通过变量泵 - 定量马达液压回路驱动轮胎,实现无级调速;步履式纵移时,支腿通过 AB 组油缸交替顶升与收缩,形成步进式移动,单次步距可达 500mm。驱动轮组配备液压推杆制动器与盘式制动器双重制动,紧急制动距离小于 0.5 米。
转向与同步控制
转向机构通过连杆与转向油缸联动,如三号柱的 16 个走行轮组分为四组,每组由单个油缸推动实现同步转向,***转向角度 ±15°。同步控制依赖电液比例阀与 PLC 程序,位移传感器实时监测各支腿高差,通过偏差耦合同步算法将误差控制在 ±2mm 内。
轨道与支腿协同
轨道系统采用可调式基座技术,允许 0-100mm 沉降调整与 0-40mm 侧向位移,适应地质不均匀沉降。例如,在郑济高铁黄河大桥施工中,轨道通过预埋螺栓与箱梁腹板固结,配合可调垫板实现 ±5mm 高程微调。
三、作业流程与工程应用
行走作业分为纵移过孔与横移定位两阶段:
纵移过孔
以 JQ900A 型为例,流程为:①三号柱驱动轮胎前行,一号柱托挂轮组沿机臂下耳梁滑动;②中支腿油缸顶升整机,三号柱收缩脱离轨道;③一号柱与三号柱交替步进,完成 50 米级跨孔移位,平均速度 0.3m/min。
横移定位
液压马达驱动起重小车沿机臂轨道横移,速度 3m/min,通过横移油缸实现 ±20cm 精调,结合激光测距仪与全站仪,落梁误差控制在 ±5mm 内。
在常泰长江大桥施工中,行走机构通过分布式液压油缸与均衡滑轮组,成功实现 1642.9 吨钢桁梁的曲线架设,验证了其在大跨度、小半径工况下的适应性。类似地,兰考至原阳高速黄河大桥采用 LG700 提吊式架桥机,通过台车转向油缸与轨道导向装置配合,完成 100 米钢混组合梁的***就位。
 扫一扫 关注我们的微信
扫一扫 关注我们的微信张经理
河南省商丘市民权县庄子镇逍遥社区90号
河南鹏跃起重机有限公司 网站地图