专注起重研发生产,集销售、服务、维修为一体的公司
以客户价值为中心,以质量赢市场,以创新促发展,管理以人为本,服务以质为先。
以客户价值为中心,以质量赢市场,以创新促发展,管理以人为本,服务以质为先。

您的位置:新闻中心 >
新闻资讯 / 2025-08-18
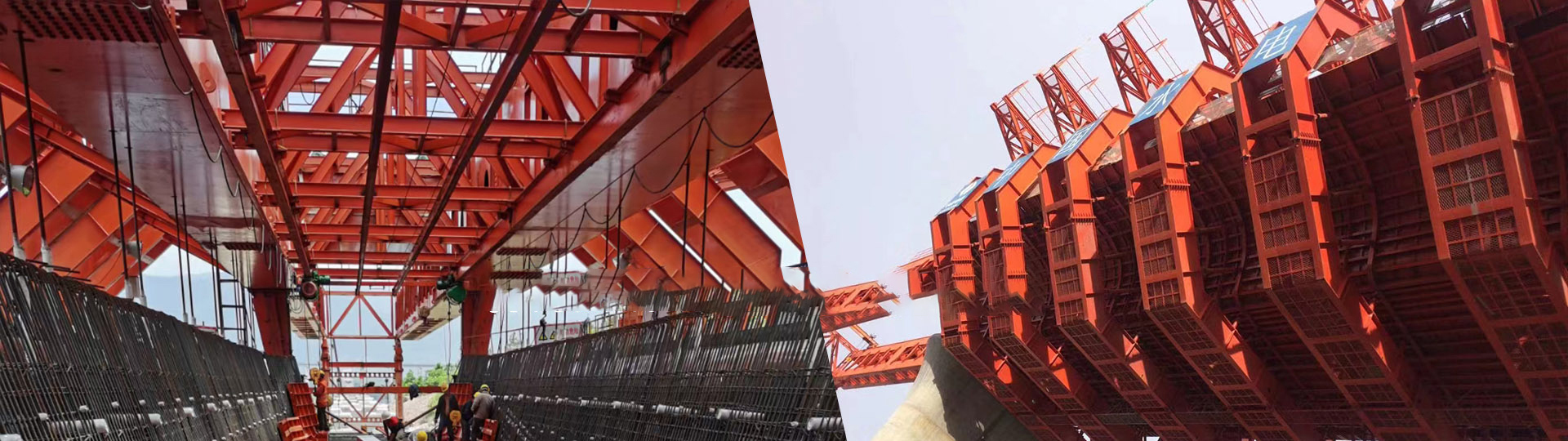
移动模架行走系统是桥梁现浇施工的核心执行单元,通过精密机械结构与智能控制实现模架的***移位。其设计需兼顾高可靠性与环境适应性,主要由轨道系统、驱动装置、导向机构及安全防护模块组成。

一、轨道系统与基础承载设计
行走轨道通常采用 Q345B 热轧 H 型钢或箱型梁,截面尺寸根据跨度设计(如 80mm×50mm 轨道方钢,中心距 1900±2mm)。轨道安装前需进行预压试验,加载至 1.2 倍设计荷载持续 48 小时,消除非弹性变形后采用高强螺栓与预埋钢板刚性连接。例如,巢马铁路分离式移动模架通过双轨并行设计,在 52 米跨度箱梁上实现纵移过孔时的毫米级精度控制。轨道表面需定期涂抹锂基润滑脂,确保摩擦系数≤0.15,同时设置限位挡块(高度 50-100mm)防止台车脱轨。
二、驱动装置与动力传输
行走系统采用液压驱动与机械驱动结合的复合模式:
液压驱动:轴向柱塞泵输出高压油液(21-35MPa)驱动双作用油缸,如某地铁项目 MSS 模架通过 4 台 18 吨液压千斤顶实现纵移,速度 0.5-1.0m/min,同步误差≤±2mm。油缸内置位移传感器,配合电液比例阀实现闭环控制,动态响应时间≤50ms。
机械驱动:伺服电机(功率 15-30kW)通过蜗轮蜗杆减速器驱动链轮链条,适用于高精度横移(行程 ±200mm)。例如,浦东机场箱涵模架采用 4 台伺服电机同步控制侧模开合,定位精度达 ±0.01mm。
三、导向与同步控制技术
行走系统通过三重机制确保移位精度:
机械导向:台车两侧安装可调式导向轮(间距偏差≤±1mm),与轨道翼缘紧密贴合,横向约束位移≤2mm。
传感器监测:激光测距仪(精度 ±0.1mm)实时监测主梁挠度,倾角传感器(精度 ±0.01°)动态修正纵移轨迹。例如,潍宿高铁安丘汶河特大桥通过北斗定位模块(定位精度 ±2mm)实现 40 米跨度箱梁的无缝衔接。
同步算法:采用主从控制策略,以某一支腿为基准,通过 PID 控制器调节其余油缸流量。如 DSZ49/1700t 移动模架的双闭环模糊 PID 系统,将四缸同步误差控制在 ±1mm 内。
四、安全防护与冗余设计
系统设置多级安全屏障:
机械锁止:纵移到位后启动液压锁(保压时间≥24 小时),同时插入钢制插销(直径≥30mm)进行双重锁定。
过载保护:压力变送器实时监测油缸负载,当超过设计值的 85% 时自动切断动力输出,并触发声光报警(分贝≥85dB)。
冗余驱动:关键回路配置双泵双阀,如某高铁项目液压系统设置备用油泵,确保主泵故障时仍能完成紧急制动。
五、工程实践与维护要点
在滨州乐安黄河大桥施工中,分离式移动模架的行走系统通过 100 余个传感器协同工作,实现 52 米跨度箱梁的单日过孔,工效提升一倍。日常维护需重点检查:
轨道状态:每周测量轨距偏差(允许 ±3mm),每季度进行无损探伤检测轨道焊缝。
驱动元件:液压油缸密封件每 500 小时检查一次,发现泄漏立即更换;伺服电机轴承每 200 小时加注耐高温润滑脂。
控制系统:每月校验激光测距仪精度(误差≤±0.5mm),每季度更新 PLC 程序逻辑,确保信号传输延迟≤10ms。
移动模架行走系统通过材料优化(如 Q345B 轨道钢)、智能调控与精细化维护,在保障施工安全的同时显著提升效率,其技术细节直接影响桥梁建设的经济性与结构品质。
 扫一扫 关注我们的微信
扫一扫 关注我们的微信张经理
河南省商丘市民权县庄子镇逍遥社区90号
河南鹏跃起重机有限公司 网站地图