专注起重研发生产,集销售、服务、维修为一体的公司
以客户价值为中心,以质量赢市场,以创新促发展,管理以人为本,服务以质为先。
以客户价值为中心,以质量赢市场,以创新促发展,管理以人为本,服务以质为先。

您的位置:新闻中心 >
新闻资讯 / 2025-07-28
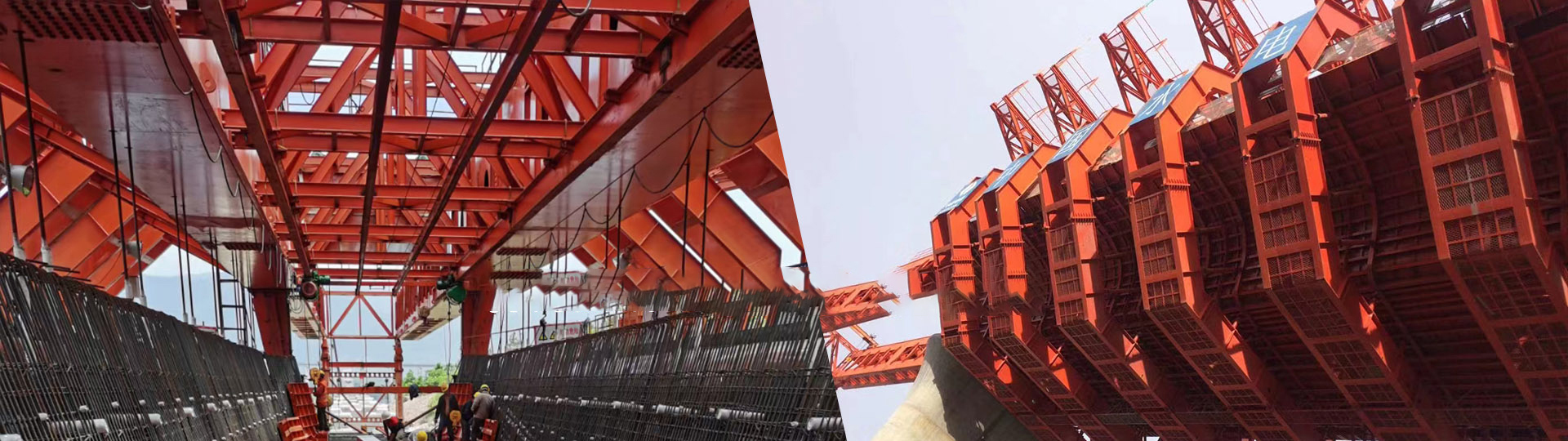
双梁式架桥机的落梁过程控制是桥梁架设的核心环节,其通过多维度协同控制与动态监测实现梁体平稳就位。以 JQ900A 型架桥机为例,落梁过程分为四个关键阶段:

预就位阶段
架桥机通过液压驱动系统将梁体吊运至墩顶上方 2-3 米处悬停,启动三维激光扫描系统对墩顶支座位置进行实时扫描,生成毫米级精度的三维坐标图。同时,中支腿压力倾角传感器与前支腿荷载传感器同步监测支撑反力与地基沉降,若数据偏差超过 ±2mm,系统自动触发液压补偿装置调整机臂姿态。
渐进式下放控制
采用 "液压驱动 + 伺服电机" 复合控制模式,四台卷扬机通过偏差耦合同步算法实现同步下放。该算法通过实时计算各吊点位移差(控制在 ±1.5mm 内),动态调整电液比例阀开度,确保梁体在 8% 纵坡或软土地基上仍能保持水平下降。当梁底距支座顶面 50cm 时,系统自动切换至变频调速模式,将下放速度降至 0.3 米 / 分钟以下。
***对位技术
横移油缸推动二号柱带动机臂摆头,配合起重小车横移机构实现横向 ±5mm 级调整。纵向对位则依赖一号柱销轴定位装置与机臂的机械锁定,通过位移编码器反馈数据进行微米级修正。在集大原高铁冯村特大桥施工中,采用激光测距仪与全站仪联合定位,将 276 吨钢横梁的横向偏差控制在 2mm 以内。
荷载转移与锁定
梁体接触支座后,通过反提吊挂轴销传感器实时监测支座反力,当四个支座荷载均衡度达到 95% 以上时,启动临时支座锁定装置。中铁十七局在珠机城际铁路施工中,采用 "液压千斤顶 + 楔形垫块" 组合系统,在 30 分钟内完成荷载从吊具到***支座的平稳转移,整联梁体线性偏差控制在 8mm 以内。
该控制技术通过多传感器融合监测与智能算法协同,将传统依赖人工测量的落梁作业误差从 ±15mm 压缩至 ±3mm,同时减少 60% 的人工干预时间。在温霍项目切德克苏河大桥施工中,采用 "四角双三角形" 稳定体系与智能安全帽监控系统,实现 40 米 T 梁落梁全程可视化管理,单日架设效率提升 40%。这种技术优势尤其适用于山区桥梁、跨既有线等复杂工况,通过动态平衡系统与应急预案联动,可有效规避因风力、地基沉降等因素引发的安全风险。
 扫一扫 关注我们的微信
扫一扫 关注我们的微信张经理
河南省商丘市民权县庄子镇逍遥社区90号
河南鹏跃起重机有限公司 网站地图